|
آموزش رباتیک
برای دانش آموزان و همه علاقمندان علوم رباتیک و الکترونیک
آموزشگاه رباتیک در تهران تلفن
: 77422883

درس هفدم : آشنایی مقدماتی با گیت های
منطقی
در جلسه ي گذشته با عملگرهاي "AND"
و "OR"
آشنا شديم.در اين جلسه 2 آي سي که اين 2 عمل را براي ما انجام مي دهند به
شما معرفي کنيم.
عملگر
AND را در مدارهاي شماتيک به صورت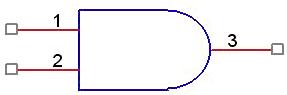 که پايههاي 1 و2 ورودي ها و پايهي 3 خروجي است که به اين مجموعه يک گيتِ
AND مي گويند.(AND
Gate)
که پايههاي 1 و2 ورودي ها و پايهي 3 خروجي است که به اين مجموعه يک گيتِ
AND مي گويند.(AND
Gate)
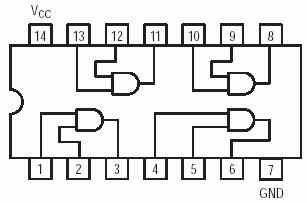
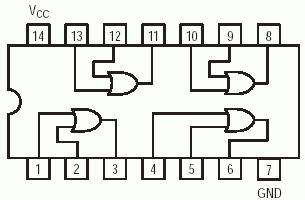
آي سي 7408 داراي 4 گيت مجزاي
AND
ميباشد، يعني ميتواند همزمان 4 عمل AND
را انجام دهد. اين آي سي 14 پايه دارد که ترتيب پايههاي آن در شکل زير شرح
داده شده.
عملگر
OR را در مدارهاي شماتيک به صورت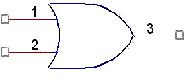 که پايه هاي 1 و2 وروديها و پايه ي 3 خروجي است که به اين مجموعه يک گيتِ
OR مي گويند.(OR
Gate)
که پايه هاي 1 و2 وروديها و پايه ي 3 خروجي است که به اين مجموعه يک گيتِ
OR مي گويند.(OR
Gate)
آي سي 7432 نيز داراي 4 گيت مجزاي
OR
مي باشد، يعني مي تواند همزمان 4 عمل OR
را انجام دهد. اين آي سي نيز، همانند 7408 داراي 14 پايه است که ترتيب پايه
هاي آن در شکل زير شرح داده شده.
|
يک
سوال مهم:
همانطور که مي دانيد گيت هاي
AND و OR
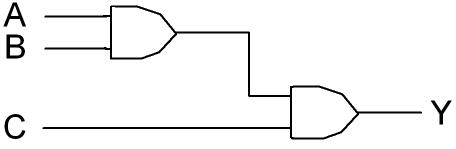
داراي 2 ورودي و 1 خروجي هستند. حال
اين سوال پيش مي آيد که چگونه ميتوان با همين گيتهاي 2
ورودي، گيتهاي 3 ورودي يا بيشتر ساخت. پاسخ اين سوال در
مدارهاي زير آمده است: |
AND:
OR:
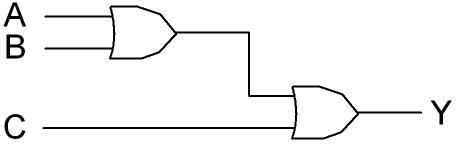
به همين ترتيب
ميتوانيد گيتهاي چندين ورودي نيز بسازيد.
درس هجدهم : آشنایی با ساختار فیزیکی
ربات تعقیب خط
سلام عرض مي کنم خدمت همه هي دوستاي خوبم
اين جلسه قراره انشاالله
با هم ساخت يه ربات مسيرياب ساده (بدون ميکروکنترلر) رو با هم شروع کنيم
کار را
ابتدا از قسمت مکانيک شروع مي کنيم، يعني بدنهي فيزيکي ربات
تا حالا به حرکت يک تانک جنگي دقت کرده ايد؟ اگر
دقت نکرده باشيد هم متوجه خواهيد شد که تانک، مثل خودروهاي شخصي معمولي
داراي سيستم فرمان نيست، يعني براي چرخش در سر پيچ ها، چرخهاي جلوي آن به
سمت خاصي متمايل نميشوند. پس تانکها چگونه حرکت ميکنند؟
به شکل زير نگاه کنيد


سيستم حرکتي تانک به اين صورت
است که در 2 طرف آن چند چرخ به وسيله ي يک تسمه ي فلزي ضخيم (به اصطلاح
شني) به يکديگر متصل شدهاند، حرکت شنيها هر کدام جداگانه توسط رانندهي
تانک کنترل ميشود و راننده عمل پيچيدن تانک به هر سمت را با توقف شني آن
سمت انجام ميدهد. مثلاً اگر تصميم داشته باشد تانک به سمت چپ بپيچد، شني
سمت چپ را متوقف کرده و شني سمت راست به حرکت خود ادامه ميدهد و در نتيجه
تانک حول محور مشخصي (محور همان شني سمت چپ است)
به سمت چپ ميپيچد.
از مهمترين مزيتهاي اين سيستم نسبت به سيستم
خودروهاي سواري، بالاتر بودن قدرت مانور آن در سر پيچها ميباشد، يعني با
سيستم تانک ميتوان با سرعت بيشتري پيچها را پيمود.
همچنين شبيهسازي اين سيستم در ابعاد کوچکتر
بسيار سادهتر از سيستم خودروهاي معموليست. به همين خاطر ما در رباتها
از همين سيستم به اصطلاح تانکي استفاده ميکنيم، اما با يک تغييرات جزيي.
ما شني را از سيستم حذف ميکنيم، يعني دور چرخ ها تسمه اي نمياندازيم،
زيرا اين تسمه براي کاربردهاي خاص طراحي شده و در ساخت يک ربات مسيرياب
نيازي به آن نيست. همچنين چرخهاي جلو را نيز ميتوانيم حذف کرده و به جاي
آن در فاصلهي بين 2 چرخ هرزگرد بگذاريم. (هرزگرد
يک چرخ است که به هر جهتي ميتواند حرکت کند. در پايهي بعضي از مبلهاي
خانگي و صندليهاي کامپيوتري از هرزگرد استفاده شده است.)
شکل زير نماي کلي ربات ما است (ديد از زير)

خود شاسي ربات نيز بهتر است
از جنس MDF يا
پلاستيک فشرده (پلکسي گلاس) باشد. براي
اتصال موتورها به بدنه هم ميتوانيد از "ديوار کوب" لولههاي آب استفاده
کنيد.
|
الگوريتم تعقيب خط در يک ربات مسيرياب |
ربات مسيرياب ساده بايد قادر باشد يک خط مشکي
رنگ به پهناي تقريبي 2 سانتيمتر را در يک زمينهي سفيد دنبال کند. البته
در رباتهاي مسيرياب حرفهاي بحث خيلي پيچيدهتر شده و رباتها بايد قادر
باشند حتي در بخشهايي از زمين مسابقه خط سفيد رنگ را در زمينهي سياه
دنبال کنند.
در جلسات قبل با سنسورهاي
نوري فتوترنزيستور آشنا شديم و ديديم چگونه ميتوان به وسيلهي اين سنسورها
و مدارات جانبي آنها تغييرات نور محيط را اندازهگيري کرد. همان طور که
ميدانيد جسم سفيد نور تابيده شده به خود را بازتاب ميکند و جسم سياه رنگ
بيشتر نور تابيده شده به خود را جذب کرده و بازتاب نميکند. ما هم با
استفاده از همين خاصيت و به کمک گيرنده فرستندههاي نوري خود ميتوانيم خط
سياه را در کف زمينهي سفيد تشخيص دهيم.
به اين صورت که ما يک جفتِ گيرنده فرستنده
گيرندهي نوري را در کنار هم قرار ميدهيم، با مدارهاي راهانداز، فرستنده،
نور را به کف زمين ميتاباند و گيرنده با توجه به تغييرات نور دريافتي از
کف زمين، ميتواند خط سياه را پيدا کند. به شکل نگاه کنيد. (ديد از بالا)
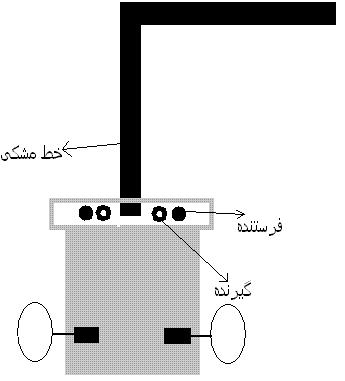
بر روي بدنهي ربات 2 سنسور به گونهاي تعبيه
شده است که وقتي ربات دقيقاً بر روي خط قرار ميگيرد سنسورها در 2 طرف خط
مشکي رنگ قرار گيرند. زماني که ربات را فعال ميکنيم هر 2 چرخ ربات شروع به
چرخيدن به سمت جلو ميکنند. ربات به سمت
جلو حرکت ميکند تا زماني که مانند شکل ربات به پيچ اول برسد و سنسور سمت
راست آن بر روي خط مشکي قرار گيرد، حال ربات بايد به صورت خودکار موتور سمت
راست خود را خاموش کند تا با چرخش موتور سمت چپ، ربات به دور خود بچرخد و
از مسير منحرف نشود. پس الگوريتم حركت ربات به اين صورت است كه سنسور هر
سمت بر روي خط قرار بگيرد، موتور همان سمت متوقف ميشود تا ربات به مسير
اصلي باز گردد.
اما مشكلي كه در اينجا مطرح ميشود اين است كه
اگر ربات با سرعت زيادي حركت كند و قادر نباشد سر پيچ بطور كامل پيچ را
دنبال كند و از خط خارج شود ديگر راهي براي بازگشت به مسير اصلي وجود ندارد.
براي حل اين مشكل به هر طرف، چند سنسور ديگر
اضافه ميكنيم تا اگر سنسور اول از خط خارج شد، سنسورهاي بعدي بتوانند خط
را دنبال كنند. به شكل دقت كنيد.
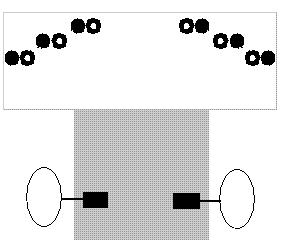
دقت كنيد كه سنسورها مستقيماً در كنار هم چيده
نشدهاند و يه صورت زاويه دار (به شكل هشتي) چيده شدهاند(چرا؟)
اين هم
نحوهي چينش سنسورهاي كف يك ربات مسيرياب حرفهاي

باقي مطالب در خصوص
ساخت يك ربات مسيرياب ساده در جلسهي آينده بر روي سايت قرار ميگيرد.
|
درس 16 و 15
درس 18 و 17
درس 20 و 19 درس 22 و
21 درس 24 و 23
درس 26 و 25
|
| درس 28 و 27
درس 30 و 29
درس 32 و 31 درس 34 و
33 درس 36
و 35
درس 38 و 37 |
| درس 40 و 39
درس 42 و 41
درس 44 و 43
درس 46 و 45
درس 48 و47
درس 50 و 49 |
| درس 52 و 51
درس 54 و 53
درس 56 و 55
درس 58 و 57
درس 60 و 59
درس 62 و 61 |
 |