|
آموزش رباتیک
برای دانش آموزان و همه علاقمندان علوم رباتیک و الکترونیک
آموزشگاه رباتیک در تهران تلفن
: 77422883

درس سی و پنج :
مقایسه انواع موتور و راه انداز موتور ( درایورها )
یکی از مهمترین اجزای یک ربات بخش مکانیکی و سیستم تولید
کننده نیروی محرکه آن می باشد.
از موتور برای تبدیل انرژی الکتریکی به انرژی مکانیکی
استفاده میشود.
بسته به کارکرد ربات ، توان مصرفی ، دقت لازم و پارامترهایی
از این قبیل نوع موتور ربات انتخاب می شود. بی شک یکی از مشخصه های اصلی
موفقیت یک ربات انتخاب صحیح موتور محرک ربات می باشد. در یک دسته بندی کلی
سه نوع موتور الکتریکی وجود دارد:
·
موتور
AC
· موتور
DC
· موتور پلهای (Stepper
motor)
در این گفتار تنها به بررسی اجمالی خصوصیات این سه نوع
موتور و مقایسه آنها اشاره خواهد شد:
موتور
AC
· معمولاً در مدارهایی با مصرف انرژی زیاد و دستگاههای
الکتریکی خانگی مورد استفاده قرار میگیرد.
· این موتورها با جریان متناوب برق کار میکنند لذا به آنها
موتور
AC
گفته میشود. یخچال ، جاروبرقی و آبمیوه گیری موتور
AC
دارند.
· مکانیسم کنترلی موتورهایAC
تقریباً پیچیده است.
· برای کنترل میزان چرخش موتور از وسیلهای به نام شیفت
انکودر استفاده میشود.
موتور
DC
· توان مکانیکی آنها عموماً کمتر از موتورهای
AC
است.
· موتورهای
DC
ساختار سادهای دارند.
· بسیاری از اسباب بازیهای برقی با موتور
DC
کار میکنند.
· آرمیچر بارزترین نوع موتور
DC
است.
· اغلب برای استفاده از موتورDC
به مدار راهانداز نیاز داریم.
· برای چرخش یکنواخت موتور
DC
فقط کافیست تغذیه موتور با یک ولتاژ
DC
صاف (رگوله( مثل باطری تأمین شود.
ایراد موتور
DC
عدم امکان کنترل دقیق سرعت و چرخش موتور است. برای امتحان این موضوع کافیست
تغذیه یک آرمیچر در حال چرخش را قطع کنید و مشاهده کنید که مدتی طول می کشد
تا آرمیچر بطور کامل از حرکت باز ایستد.
· قیمت پایین، تنوع قدرت و سرعت، از جمله مزایای استفاده از
موتورهای
DC
میباشد.
موتور پلهای (Stepper
motor)
· استپ موتور نوعی موتور مثل موتورهای
DC
است که حرکت دورانی تولید می کند. با این تفاوت که استپ موتورها دارای حرکت
دقیق و حساب شده تری هستند.
· این موتورها به صورت درجه ای دوران می کنند و با درجه های
مختلف در بازار موجود هستند.
· موتورهای پله ای موجود در بازار معمولا در دو نوع ۵ یا ۶
سیم یافت می شود.
· موتور دیسک سخت یک نمونه موتور پلهای است.
· کاربرد اصلی این موتورها در کنترل موقعیت است.
· این موتورها ساختار کنترلی سادهای دارند. لذا در ساخت
ربات کاربرد زیادی دارند. بطوریکه به تعداد پالسهایی که به یکی از پایههای
راه انداز آن ارسال میشود موتور به چپ یا راست میچرخد.
· توان خروجی این موتورها کمتر از دو نوع قبلی است.
· استفاده از موتور پلهای مشکلاتی از جمله وزن زیاد، قیمت
بالا و قدرت بسیار کم را بدنبال دارد.
اصول کار موتور پلهای
· واژه پله به معنی چرخش به اندازه درجه تعریف شده موتور
است.
مثلاً موتور پلهای با درجه ۱.۸ باید ۲۰۰ پله حرکت کند تا
۳۶۰ درجه
یا یک دور کامل بچرخ د:
360=1.8
*200
یک استپ موتور با درجه ۱۵ فقط باید ۲۴ پله برای یک دور
کامل انجام دهد :
24 * 15 = 360
به این ترتیب هرچه تعداد پله
های یک موتور بیشتر باشد دقا چرخش آن افزایش مییابد.
· مکانیسم کنترلی موتور پله ای طوریست که امکان کنترل سرعت
به سادگی میسر می شود.
موتور پله کامل و نیم پله
· در حالت عادی میزان چرخش موتور به تعداد پالسهای اعمالی و
گام موتور بستگی دارد. هر پالس یک پله موتور را میچرخاند.
· با تحریک دو فاز مجاور در موتور میتوان موتور را به
اندازه نیم پله حرکت داد. به این ترتیب تعداد پلههای موتور دو برابر
میشود و در نتیجه دقت چرخش موتور هم دوبرابر می گردد.
راه اندازی موتور پلهای
· تراشه
L297
یک راه انداز مناسب برای موتور پلهای است.
· مدارهای راهانداز متنوعی برای استفاده از موتورهای
پلهای وجود دارد. در اینجا از مدارمجتمع
L297
و
L298
برای راهاندازی موتور پلهای استفاده میشود.
· جهت کنترل موتور به قابلیت هایی همچون حرکت به عقب و جلو،
کنترل سرعت، کنترل جریان و توقف آنی موتور احتیاج داریم و این نیازها را
درایور مورد نظر ما یعنی
L298
براحتی تامین می نماید.
L298
یک آی
سی پل-H
دوتایی (
DUALH-Bridge)
دارای ۱۵ پایه میباشد که قادر است وظایفی چون چرخش موتور به عقب و جلو،
کنترل سرعت، کنترل جریان و توقف آنی موتور را انجام دهد. کنترل موتور به
این شرح است که پس از محاسبه میزان چرخش موتور برای جابجایی مورد نظر با
استفاده از میکرو کنترلر به تعداد مورد نظر پالس به پایه راه انداز ارسال
میکنیم.
· یک پایه برای تعیین جهت چرخش (ساعتگرد و پاد ساعتگرد)
مورد استفاده قرار میگیرد.
· پایه
Enableمدار
راهانداز را فعال و غیر فعال مینماید.
درس سی و
ششم : راه اندازی موتورهای ربات
الف - آموزش راه اندازی موتور
DC
با استفاده آز آی سی درایور
L298N
در دو جهت

درایور چیست ؟
همان طور که می دانیم موتور های جریان مستقیم برای کار کردن نیاز به تغذیه
(بایاس) دارند . معمولا موتور هایی که برای ساخن ربات های دانشگاهی استفاده
می شود با ولتاژ های 5 یا 6 یا 9 یا 12 یا 24 کار می کند . و بسته به مدل ،
روش ساخت ، قیمت و ... دارای جریان کشی حدود 100 میلی آمپر تا 5 آمپر می
باشند . یک روش آن است که آن را مستقیما به باطری وصل نماییم در این صورت
با سرعت نهایی هود و در یک جهت خاص می چرخد اما در ربات ها ما نیاز به
کنترل موتور [ روشن و خاموش کردن ، کنترل سرعت ، کنترل جهت و کنترل موقعیت
] داریم در نتیجه باید موتور را با استفاده از کنترلر ها ( مدارات منطقی یا
مایکروکنترلر ها یا پی ال سی یا رایانه) کنترل نماییم . آما همان طور که می
دانیم خروجی میکروکنترلر ها 5 ولت و 2 میلی آمپر است و نمی تواند موتور را
بچرخاند . بنابراین ما نیاز به مدارات واسطه برای اتصال کنترلر به موتور
داریم . به این مدارات درایور می گویند . که این درایور می تواند ترکیب رله
و ترانزیستور یا آی سی یا مدارات ترکیبی باشد . معمولا برای موتور های
دارای ولتاژ 5 تا 46 و جریان حداکثر 2 آمپر از آی سی
L298N
استفاده می شود . قابل ذکر است با یک آی سی می توان دو موتور دی سی را
همزمان کنترل نمود .
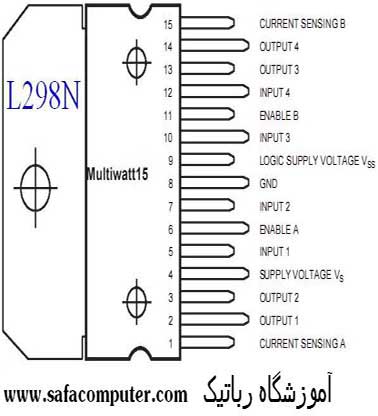
ترتیب و نام پایه ها ی آی سی
L298N
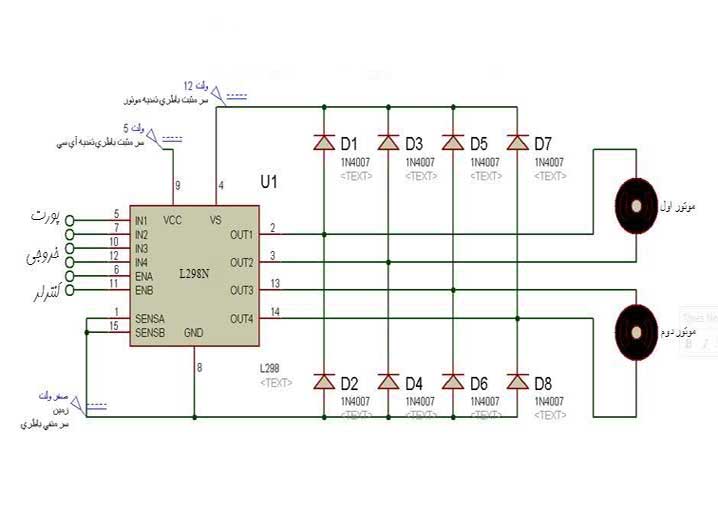
راه اندازی دو موتور جریات مستقیم به صورت هم زمان با قابلیت گردش در دو
جهت
برای راه اندازی ، به دو باطری نیاز داریم . یکی برای تغذیه آیسی و دیگری
برای تغذیه موتور ها ، منفی دو باطری را با سیم به هم وصل می کنیم و آن را
«زمین» می نامیم یعنی مقدار آن صفر ولت ، فرض می شود . دقت شود باطری تغذیه
موتور ، دارای ولتاژی برابر با ولتاژ موتور و دارای قابلیت جریان دهی بیشتر
یا مساوی با جریان مورد نیاز دو موتور باشد . همچنین ولتاژ باطری تغذیه آی
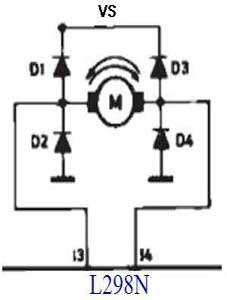
سی باید بین 4/5 تا 7 ولت باشد . برای جلوگیری از سوختن آی سی باید پایه
های 2 و 3 و 14 و 15 را با استفاده از دیود محافظت کنیم یعنی به هر یک از
پایه ها دو دیود وصل می نماییم . کاتد دیود اول را ( قسمتی که خط دارد ) به
سر مثبت باطری تغذیه موتور ، و آند دیود اول را به پایه آیسی وصل می نماییم
و کاتد دیود دوم را به پایه آیسی و آند دیود دوم را به زمین وصل می نماییم
( مطابق شکل ) . بهتر است دو سر پایه ورودی موتور را با یک خازن بدون قطب
پلاستیکی ظرفیت بالا ، به هم وصل نمایید . سپس طبق آن چه در زیر آمده پایه
ها را وصل می نماییم .
پایه شماره یک
CURRENT
SENSING A
این پایه را به زمین ( منفی باطری ) وصل می نماییم .
پایه شماره دو
OUT
PUT 1
این پایه را به یک سر ورودی پایه ی موتور اول وصل می نماییم . ( حفاظت توسط
دو دیود فراموش نشود)
پایه شماره سه
OUT
PUT 2
این پایه را به سر دیگر پایه ی ورودی موتور اول وصل می نماییم . ( حفاظت
توسط دو دیود فراموش نشود)
پایه شماره چهار SUPPLY
VOLTAGE VS
این پایه را به سر مثبت باطری تغذیه موتور وصل می نماییم .
پایه شماره پنج
INPUT 1
این پایه را به یکی از پایه های کنترلر وصل می نماییم .
پایه شماره شش
ENABLE A
این پایه را به یکی از پایه های کنترلر وصل می نماییم .
پایه شماره هفت
INPUT
2
این پایه را به یکی از پایه های کنترلر وصل می نماییم .
پایه شماره هشت
GND
این پایه را به زمین ( منفی باطری ) وصل می نماییم .
پایه شماره نه
LOGIC SUPPLY VOLTAGE VSS
این پایه را به سر مثبت باطری تغذیه آی سی وصل می نماییم .
پایه شماره ده
INPUT
3
این پایه را به یکی از پایه های کنترلر وصل می نماییم .
پایه شماره یازده
ENABLE B
این پایه را به یکی از پایه های کنترلر وصل می نماییم .
پایه شماره دوازده
INPUT 4
این پایه را به یکی از پایه های کنترلر وصل می نماییم .
پایه شماره سیزده
OUT
PUT
3
این پایه را به یک سر ورودی پایه ی موتور دوم وصل می نماییم . ( حفاظت توسط
دو دیود فراموش نشود)
پایه شماره چهارده
OUT
PUT 4
این پایه را به سر دیگر ورودی پایه ی موتور دوم وصل می نماییم . ( حفاظت
توسط دو دیود فراموش نشود)
پایه شماره پانزده
CURRENT SENSING B
این پایه را به زمین ( منفی باطری ) وصل می نماییم .
کنترل موتور
اکنون می توانید با نوشتن برنامه در کنترلر (میکروکنترلر یا رایانه یا ....
) موتور را به وسیله 6 پایه کنترل نمایید .
|
ENABLEA -
پایه 6 |
پایه 5
- INPUT1 |
پایه 7 -
INPUT2 |
موتور 1
|
| 0 |
0 |
0 |
خاموش |
| 1 |
1 |
0 |
راست گرد |
| 1 |
0 |
1 |
چپ گرد |
| |
|
|
|
|
ENABLEB -
پایه 11 |
پایه 10
- INPUT3 |
پایه 12 -
INPUT4 |
موتور 2
|
| 0 |
0 |
0 |
خاموش |
| 1 |
1 |
0 |
راست گرد |
| 1 |
0 |
1 |
چپ گرد |
ب - آموزش راه اندازي موتور پله اي مغناطيس دائم با
استفاده از آي سي درايور
L293D

نياز موتور هاي پله اي به درايور
موتور
هاي پله اي بر خلاف موتور هاي دي سي ، داراي چند سيم ورودي مي باشند .
موتور هاي پله اي مغناطيس دائم به دو نوع «تک قطبي»
unipolar
و «دو قطبي» bipolar تقسيم مي شوند . نوع
تک قطبي 4 سيم ورودي دارند و نوع دو قطبي 5 يا 6 سيم ورودي دارد . ولتاژ
معمول اين موتور ها 5 و 12 و 24 مي باشد ولي مي توان ولتاژ هايي ديگر از آن
يافت که تعداد آن بسيار کم است . اين موتور ها با توجه به شرکت سازنده و
ساختمان داخلي و .. داراي جريان کشي متفاوتي مي باشند . چون جريان و ولتاژ
موتور هاي پله اي زياد است و نمي توان آن را مستقيما به کنترلر وصل نمود
مجبوريم درايور ها استفاده کنيم . که يکي از آي سي هاي معروف جهت درايو
موتور هاي کوچک آي سي L293D مي باشد .آي
سي L293D تنها موتور هايي را که داراي
ولتاژي بين 5 تا 36 و جريان کشي حداکثر 600 ميلي آمپر مي باشند را مي تواند
راه اندازي نمايد. عواملي چون قيمت ارزان ، شکل و اندازه مناسب ، باياس و
کنترل راحت ، عدم نياز به مدار محافظ عدم نياز به گرماگير (HEAT
SINK) و پايداري مناسب نسبت به تغييرات دما و
سرعت بالا ؛ باعث شده است اين آي سي در بين ربات سازان معروف شود . قابل
ذکر است بسامد کاري اين آي سي 5 کيلو هرتز مي باشد . اي آي سي مي تواند
جريان تا 1200 ميلي آمپر را تا 100 ميکروثانيه و غير تکراري تحمل نمايد .
اگر موتور شما جريان بيشتري مي کشد مي توانيد از اي سي هاي قدرتمند تر نظير
L298N
استفاده نماييد .
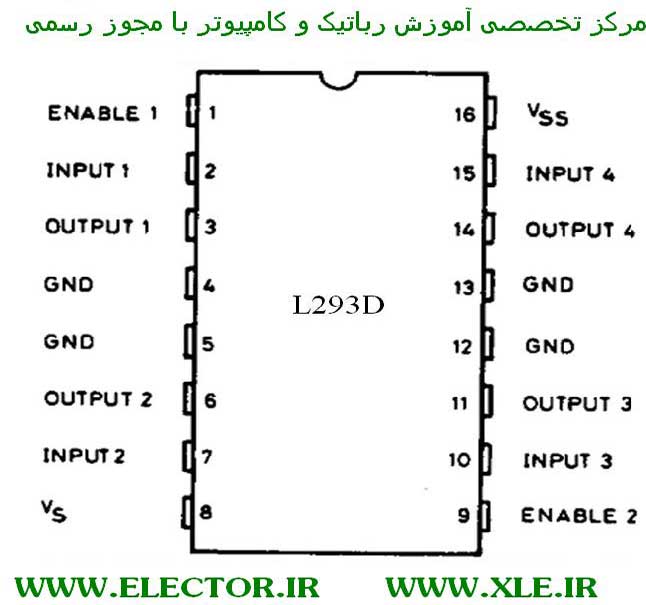
ترتيب و نام پايه ها ي آي سي
L293D
راه اندازي دو موتور جريات مستقيم به صورت هم زمان با قابليت گردش در دو
جهت
براي راه اندازي ، به دو باطري نياز داريم . يکي براي تغذيه آيسي و ديگري
براي تغذيه موتور ها ، منفي دو باطري را با سيم به هم وصل مي کنيم و آن را
«زمين» مي ناميم يعني مقدار آن صفر ولت ، فرض مي شود . دقت شود باطري تغذيه
موتور ، داراي ولتاژي برابر با ولتاژ موتور و داراي قابليت جريان دهي بيشتر
يا مساوي با جريان مورد نياز دو موتور باشد . همچنين ولتاژ باطري تغذيه آي
سي بايد بين 4/5 تا 7 ولت باشد . اگر موتور دو قطبي بود خروجي هاي 1 و 2
موتور را به سر مثبت باطري تغذيه موتور وصل مي نماييم . سپس طبق آن چه در
زير آمده پايه ها را وصل مي نماييم .
پايه شماره يک
ENABLE 1
اين پايه را به سر مثبت باطري تغذيه آي سي وصل مي نماييم .
پايه شماره دو
INPUT 1
اين پايه را به يکي از پايه هاي کنترلر وصل مي نماييم .
پايه شماره سه
OUTPUT 1
اين پايه را به يک سر پايه ي ورودي موتور اول وصل مي نماييم .
پايه شماره چهار
GND
اين پايه را به زمين ( منفي باطري ) وصل مي نماييم .
پايه شماره پنج
GND
اين پايه را به زمين ( منفي باطري ) وصل مي نماييم .
پايه شماره شش
OUTPUT 2
اين پايه را به سر ديگر پايه ي ورودي موتور اول وصل مي نماييم .
پايه شماره هفت
INPUT 2
اين پايه را به يکي از پايه هاي کنترلر وصل مي نماييم .
پايه شماره هشت
ENABLE 2
اين پايه را به سر مثبت باطري تغذيه آي سي وصل مي نماييم .
پايه شماره نه
SUPPLY VOLTAGE VS
اين پايه را به سر مثبت باطري تغذيه موتور وصل مي نماييم .
پايه شماره ده
INPUT 3
اين پايه را به يکي از پايه هاي کنترلر وصل مي نماييم .
پايه شماره يازده
OUTPUT 3
اين پايه را به يک سر پايه ي ورودي موتور دوم وصل مي نماييم .
پايه شماره دوازده
GND
اين پايه را به زمين ( منفي باطري ) وصل مي نماييم .
پايه شماره سيزده
GND
اين پايه را به زمين ( منفي باطري ) وصل مي نماييم .
پايه شماره چهارده
OUTPUT 4
اين پايه را به سر ديگر ورودي پايه ي موتور دوم وصل مي نماييم .
پايه شماره پانزده
INPUT 4
اين پايه را به يکي از پايه هاي کنترلر وصل مي نماييم .
پايه شماره شانزده
LOGIC SUPPLY VOLTAGE VSS
اين پايه را به سر مثبت باطري تغذيه آي سي وصل مي نماييم .
کنترل موتور
اکنون مي توانيد با نوشتن برنامه در کنترلر (ميکروکنترلر يا رايانه يا ....
) موتور را به وسيله 4 پايه کنترل نماييد نحوه کار موتور در جدول زير آمده
است .
اگر مي خواهيد موتور پاد ساعت گرد بچرخد کافي است ترتيب اعمال ولتاژ در
ورودي را معکوس نماييد . اگر مي بينيد موتور در جهت خاصي نمي چرخد ، در
ترتيب پايه ها اشتباه کرده ايد . اگر ترتيب پايه ها را نمي دانيد جهت تشخيص
بايد تمام حالات را امتحان نماييد . در دوقطبي ها دو سيم هم رنگ وجود دارد
که آن همان سيم مشترک است يعني بايد مستقيما به سر مثبت باطري تغذيه موتور
وصل شود .
پ- آموزش راه اندازي موتور پله اي مغناطيس دائم با
استفاده آز آي سي درايور
L298N
موتور پله اي
همان طور که مي دانيد موتور هاي پله اي مغناطيس دائم به دو نوع «تک قطبي»
unipolar و «دو قطبي»
bipolar تقسيم مي شوند . نوع تک قطبي 4 سيم
خروجي دارند و نوع دو قطبي 5 يا 6 سيم خروجي دارد . ولتاژ معمول اين موتور
ها 5 و 12 و 24 مي باشد ولي مي توان ولتاژ هايي ديگر از آن يافت که تعداد
آن بسيار کم است . اين موتور ها با توجه به شرکت سازنده و ساختمان داخلي و
.. داراي جريان کشي متفاوتي مي باشند . چون جريان و ولتاژ موتور هاي پله اي
رياد است و نمي توان آن را مستقيما به کنترلر وصل نمود مجبوريم از مدار هاي
واسطه با نام درايور استفاده کنيم . که يکي از آي سي هاي معروف جهت درايو
موتور هاي کوچگ اي سي L298N مي باشد .آي
سي L298N تنها موتور هايي را که
داراي ولتاژي بين 5 تا 46 و جريان کشي حداکثر 2 آمپر مي باشند را مي تواند
راه اندازي نمايد. با توجه به اين که در ربات هاي دانشگاهي و مسابقاتي
معمولا از موتور هاي ضعيف استفاده مي شود استفاده از اين اي سي محبوبيت
زيادي پيدا کرده است .
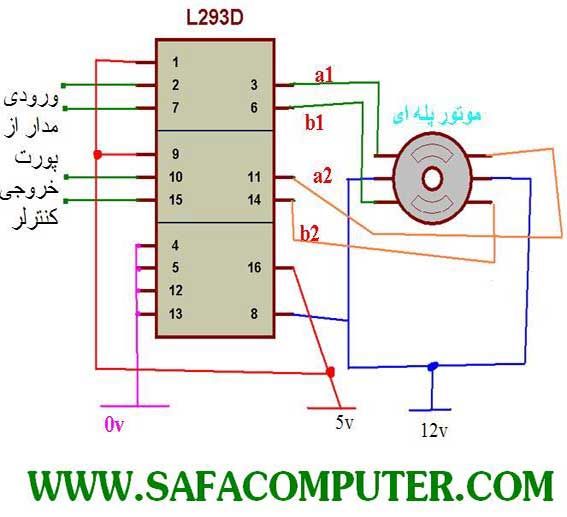
راه اندازي موتور پله اي مغناطيس دائم
براي راه اندازي ، به دو باطري نياز داريم . يکي براي تغذيه آي سي و ديگري
براي تغذيه موتور ها ، منفي دو باطري را با سيم به هم وصل مي کنيم و آن را
«زمين» مي ناميم يعني مقدار آن صفر ولت ، فرض مي شود . دقت شود باطري تغذيه
موتور ، داراي ولتاژي برابر يا بيشتر از ولتاژ موتور و داراي قابليت جريان
دهي بيشتر يا مساوي با جريان مورد نياز موتور باشد . همچنين ولتاژ باطري
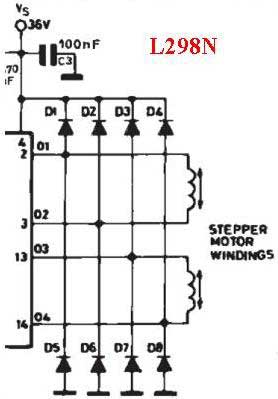
تغذيه آي سي بايد بين 4/5 تا 7 ولت باشد . براي جلوگيري از سوختن آي سي
بايد پايه هاي 2 و 3 و 14 و 15 را با استفاده از ديود محافظت کنيم يعني به
هر يک از پايه ها دو ديود وصل مي نماييم . کاتد ديود اول را ( قسمتي که خط
دارد ) به سر مثبت باطري تغذيه موتور ، و آند ديود اول را به پايه آيسي وصل
مي نماييم و کاتد ديود دوم را به پايه آيسي و آند ديود دوم را به زمين وصل
مي نماييم ( مطابق شکل ) . اگر موتور دو قطبي بود خروجي هاي 1 و 2 موتور را
به سر مثبت باطري تغذيه موتور وصل مي نماييم .
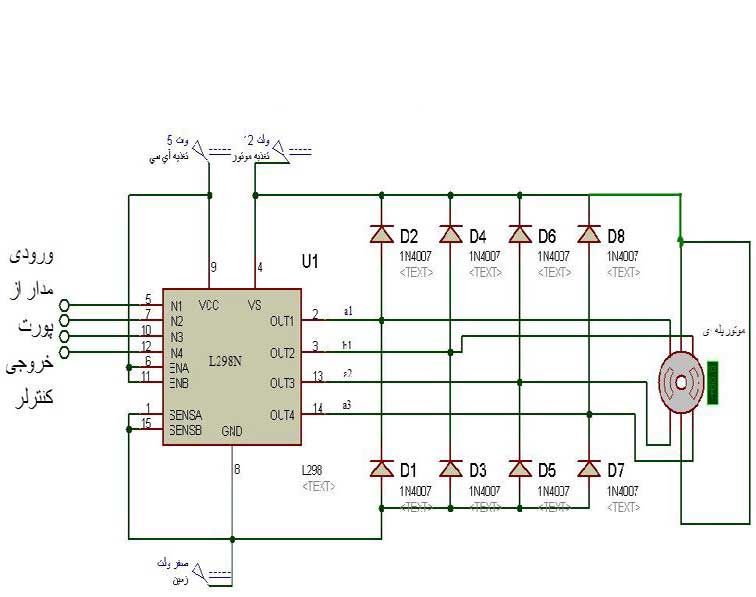
سپس طبق آن چه در زير آمده پايه ها را وصل مي نماييم .
پايه شماره يک
CURRENT SENSING A
اين پايه را به زمين ( منفي باطري ) وصل مي نماييم .
پايه شماره دو
OUT PUT 1
اين پايه را به يک پايه ي
a1 موتور
وصل مي نماييم . ( حفاظت توسط دو ديود فراموش نشود)
پايه شماره سه
OUT PUT 2
اين پايه را به يک پايه ي
b1 موتور
وصل مي نماييم . ( حفاظت توسط دو ديود فراموش نشود)
پايه شماره چهار
SUPPLY VOLTAGE VS
اين پايه را به سر مثبت باطري تغذيه موتور وصل مي نماييم .
پايه شماره پنج
INPUT 1
اين پايه را به يکي از پايه هاي کنترلر وصل مي نماييم .
پايه شماره شش
ENABLE A
اين پايه را به سر مثبت باطري تغذيه آي سي وصل مي نماييم .
پايه شماره هفت
INPUT 2
اين پايه را به يکي از پايه هاي کنترلر وصل مي نماييم .
پايه شماره هشت
GND
اين پايه را به زمين ( منفي باطري ) وصل مي نماييم .
پايه شماره نه
LOGIC SUPPLY VOLTAGE VSS
اين پايه را به سر مثبت باطري تغذيه آي سي وصل مي نماييم .
پايه شماره ده
INPUT 3
اين پايه را به يکي از پايه هاي کنترلر وصل مي نماييم .
پايه شماره يازده
ENABLE B
اين پايه را به سر مثبت باطري تغذيه آي سي وصل مي نماييم .
پايه شماره دوازده
INPUT 4
اين پايه را به يکي از پايه هاي کنترلر وصل مي نماييم .
پايه شماره سيزده
OUT PUT 3
اين پايه را به يک پايه ي
a2 موتور
وصل مي نماييم . ( حفاظت توسط دو ديود فراموش نشود)
پايه شماره چهارده
OUT PUT 4
اين پايه را به يک پايه ي
b2 موتور
وصل مي نماييم . ( حفاظت توسط دو ديود فراموش نشود)
پايه شماره پانزده
CURRENT SENSING B
اين پايه را به زمين ( منفي باطري ) وصل مي نماييم .
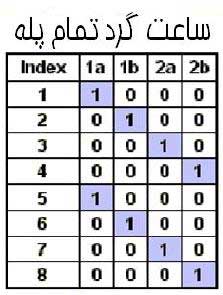
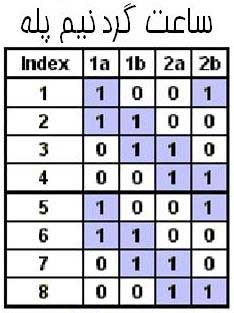
کنترل موتور
اکنون مي توانيد با نوشتن برنامه در کنترلر (ميکروکنترلر يا رايانه يا ....
) موتور را به وسيله 4 پايه کنترل نماييد نحوه کار
موتور در جدول زير آمده است .
اگر مي خواهيد موتور پاد ساعت گرد بچرخد کافي است ترتيب اعمال ولتاژ در
ورودي را معکوس نماييد . اگر مي بينيد موتور در جهت خاصي نمي چرخد ، در
ترتيب پايه ها اشتباه کرده ايد . اگر ترتيب پايه ها را نمي دانيد جهت تشخيص
بايد تمام حالات را امتحان نماييد . در دوقطبي ها دو سيم هم رنگ وجود دارد
که آن همان سيم مشترک است يعني بايد مستقيما به سر مثبت باطري تغذيه موتور
وصل شود .
مشاهده
مدارات و پروژه های عملی
میکرو AVR
 |